As many home automation and Gladys enthusiasts, I finally introduce myself.
Benji, aka pineapple, electrician/automation engineer by trade with a few years of experience.
Specialized in embedded systems and the design of special machines (CAD, electronic design, embedded programming).
Self-taught in my spare time, particularly in software design and web programming languages. Very good basics in JavaScript, Angular framework, and Node.js, obviously HTML and CSS as well.
I have been following the Gladys project for a few years now. Even though I have never contributed to the project or the forum for that matter . At the time, I couldn’t read a single line of web code.
However, today, I have decided to take the plunge and no longer remain an observer of you all!! Hence my introduction.
I am currently working on the implementation of home automation systems on industrial HMIs (non-professionally). My current project involves Husqvarna robotic lawnmowers. I am developing an HMI interface that communicates with Husqvarna robotic lawnmowers via an MQTT server. I have already made quite a bit of progress, and I think this could be easily reusable for Gladys. If no one is developing this today, I will be happy to develop this module for robotic lawnmower owners.
Welcome to the Gladys Assistant community
I have an Automower 315, so without WiFi connectivity, which I manage with the Automower Connect app.
Will what you are preparing be usable via Bluetooth?
If not, what would be the solution for users of lawnmowers without the X to benefit from it?
So I will provide a bit more detail about the work I am currently doing to respond to @pierre-gilles. Then I will indicate possible developments to answer you @gaetanb76.
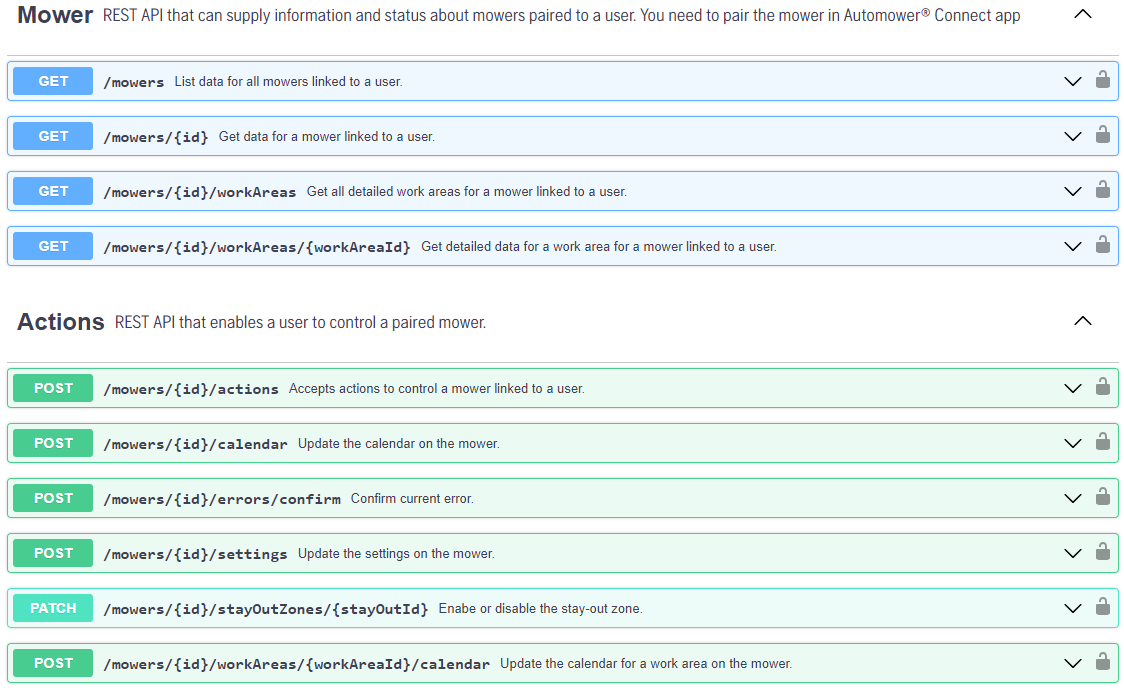
Currently, I am developing a JS program that will query the Husqvarna API to retrieve the different states of the robot(s) (as in the application), « broken down », « mowing », « on pause », etc… If necessary, I also retrieve the error code of the breakdown and send an alert to the user and indicate the steps to follow (on my HMI) to solve the problem. I can also give a start or stop command.
For Gladys, we can quite consider having a dedicated module on the dashboard that indicates the state of the machine, if there is a breakdown (which one) and have some simple buttons to give orders such as stopping the robot or making it mow. The API does not allow managing the robot’s schedule as far as I know or managing the cutting height. That said, I have already thought about doing RE (reverse engineering) to be able to manage that later.
For the moment, having a 450X at my disposal, I am really working on the communication part with the API. However, as you said @gaetanb7, in the case of a Bluetooth model, we cannot communicate with the Husqvarna API since it is a direct, local communication between the smartphone and the robot. I had not really considered doing it at the start but it is still possible to do RE to know the Bluetooth commands sent, and why not create a connected object, a kind of base in the garden. Which will allow, via Gladys, to send the commands in Bluetooth to the robot .
Fortunately, I know a person who owns several types of models including the 315 so it’s quite playable!
I hope I have answered your questions. I will surely put the project on GitLab if the heart says to the developer to contribute to the project .
Hi @pineapple_bnj, have you been able to make any progress on your Husqvarna « module » since then?
I recently bought a small model x from this brand and I’d really like to interact with it from Gladys.
I don’t get it at all but the API seems to offer quite a few functions ..