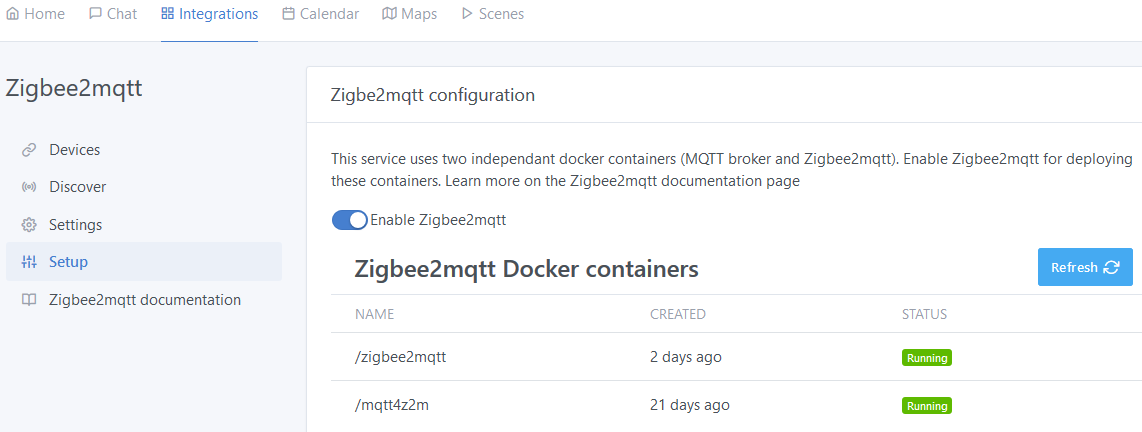
I didn’t really understand the independent MQTT story either, the topics being different anyway, I don’t really see why (for my part) I would launch an additional container for that.
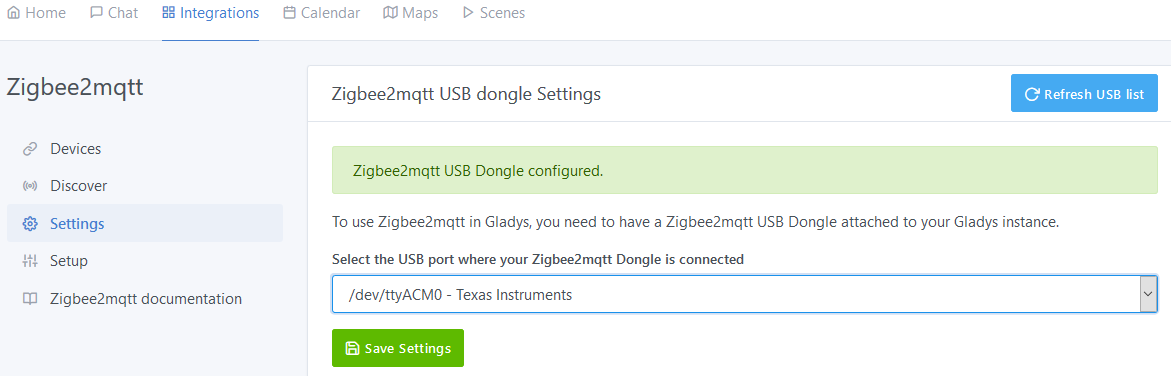
As a result, I get the impression from the screenshots that I am forced to let the service manage the containers in question (I may be wrong, I haven’t tested yet)
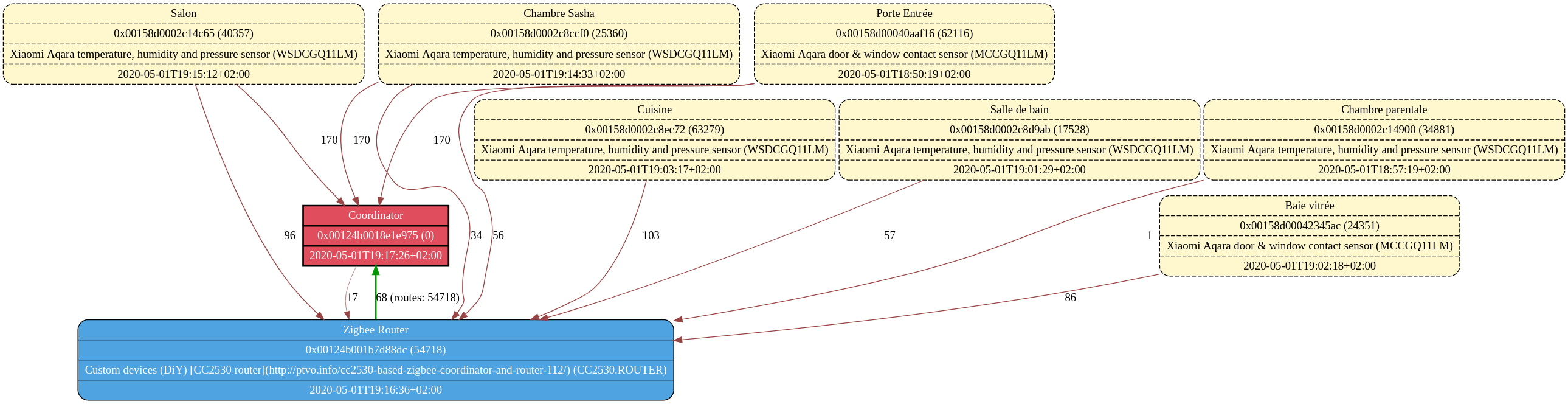
On a complex network, it’s easier to see who is communicating with whom (Device / Router / Coordinator). The one provided by default is not great, too much information in my opinion. The need is to have the routes, the type of node and the signal quality.
It is in graphviz format:
node[shape=record];
"0x00124b0018e1e975" [style="bold, filled", fillcolor="#e04e5d", fontcolor="#ffffff", label="{Coordinator|0x00124b0018e1e975 (0)|2020-05-01T19:17:26+02:00}"];
"0x00124b0018e1e975" -> "0x00124b001b7d88dc" [penwidth=0.5, weight=0, color="#994444", label="17"];
"0x00158d0002c14c65" [style="rounded, dashed, filled", fillcolor="#fff8ce", fontcolor="#000000", label="{Salon|0x00158d0002c14c65 (40357)|Xiaomi Aqara temperature, humidity and pressure sensor (WSDCGQ11LM)|2020-05-01T19:15:12+02:00}"];
"0x00158d0002c14c65" -> "0x00124b0018e1e975" [penwidth=1, weight=0, color="#994444", label="170"];
"0x00158d0002c14c65" -> "0x00124b001b7d88dc" [penwidth=1, weight=0, color="#994444", label="96"];
"0x00158d0002c8ec72" [style="rounded, dashed, filled", fillcolor="#fff8ce", fontcolor="#000000", label="{Cuisine|0x00158d0002c8ec72 (63279)|Xiaomi Aqara temperature, humidity and pressure sensor (WSDCGQ11LM)|2020-05-01T19:03:17+02:00}"];
"0x00158d0002c8ec72" -> "0x00124b001b7d88dc" [penwidth=1, weight=0, color="#994444", label="103"];
"0x00158d00040aaf16" [style="rounded, dashed, filled", fillcolor="#fff8ce", fontcolor="#000000", label="{Porte Entrée|0x00158d00040aaf16 (62116)|Xiaomi Aqara door & window contact sensor (MCCGQ11LM)|2020-05-01T18:50:19+02:00}"];
"0x00158d00040aaf16" -> "0x00124b0018e1e975" [penwidth=1, weight=0, color="#994444", label="170"];
"0x00158d00040aaf16" -> "0x00124b001b7d88dc" [penwidth=1, weight=0, color="#994444", label="56"];
"0x00124b001b7d88dc" [style="rounded, filled", fillcolor="#4ea3e0", fontcolor="#ffffff", label="{Zigbee Router|0x00124b001b7d88dc (54718)|Custom devices (DiY) [CC2530 router](http://ptvo.info/cc2530-based-zigbee-coordinator-and-router-112/) (CC2530.ROUTER)|2020-05-01T19:16:36+02:00}"];
"0x00124b001b7d88dc" -> "0x00124b0018e1e975" [penwidth=2, weight=1, color="#009900", label="68 (routes: 54718)"];
"0x00158d0002c8d9ab" [style="rounded, dashed, filled", fillcolor="#fff8ce", fontcolor="#000000", label="{Salle de bain|0x00158d0002c8d9ab (17528)|Xiaomi Aqara temperature, humidity and pressure sensor (WSDCGQ11LM)|2020-05-01T19:01:29+02:00}"];
"0x00158d0002c8d9ab" -> "0x00124b001b7d88dc" [penwidth=1, weight=0, color="#994444", label="57"];
"0x00158d0002c14900" [style="rounded, dashed, filled", fillcolor="#fff8ce", fontcolor="#000000", label="{Chambre parentale|0x00158d0002c14900 (34881)|Xiaomi Aqara temperature, humidity and pressure sensor (WSDCGQ11LM)|2020-05-01T18:57:19+02:00}"];
"0x00158d0002c14900" -> "0x00124b001b7d88dc" [penwidth=1, weight=0, color="#994444", label="1"];
"0x00158d0002c8ccf0" [style="rounded, dashed, filled", fillcolor="#fff8ce", fontcolor="#000000", label="{Chambre Sasha|0x00158d0002c8ccf0 (25360)|Xiaomi Aqara temperature, humidity and pressure sensor (WSDCGQ11LM)|2020-05-01T19:14:33+02:00}"];
"0x00158d0002c8ccf0" -> "0x00124b0018e1e975" [penwidth=1, weight=0, color="#994444", label="170"];
"0x00158d0002c8ccf0" -> "0x00124b001b7d88dc" [penwidth=1, weight=0, color="#994444", label="34"];
"0x00158d00042345ac" [style="rounded, dashed, filled", fillcolor="#fff8ce", fontcolor="#000000", label="{Baie vitrée|0x00158d00042345ac (24351)|Xiaomi Aqara door & window contact sensor (MCCGQ11LM)|2020-05-01T19:02:18+02:00}"];
"0x00158d00042345ac" -> "0x00124b001b7d88dc" [penwidth=1, weight=0, color="#994444", label="86"];
}
In any case, the topology map is not a priority