Hello everyone!
The next version of Gladys is almost finalized and brings its share of new compatibilities and bug fixes ![]()
This time, there are no new features, but long-term work on compatibility with new major versions of Linux OS: Debian 11 and Ubuntu > 20.04, as well as changes to facilitate installation on NAS Unraid and Synology.
There were notably problems running the MQTT and Zigbee2mqtt containers on these platforms.
Bug fixes
-
Fix a quite important bug where the refresh rate of devices like cameras was not necessarily taken into account after a change, or worse, the refresh rate was taken into account several times, which means that a camera whose frequency has been changed could refresh several times per cycle
-
Fix a bug in the scenes where the « try » button of the « HTTP request » action did not take into account the headers provided
-
Fix a bug where the name of a dashboard was not updated in the list when the name of the current dashboard was renamed
-
Add translations on vibration sensors
I need you
I need you to test this version in advance. I am addressing a CONFIRMED audience!! If you read this post and are not sure of yourself, wait next week for the release of the production image ![]()
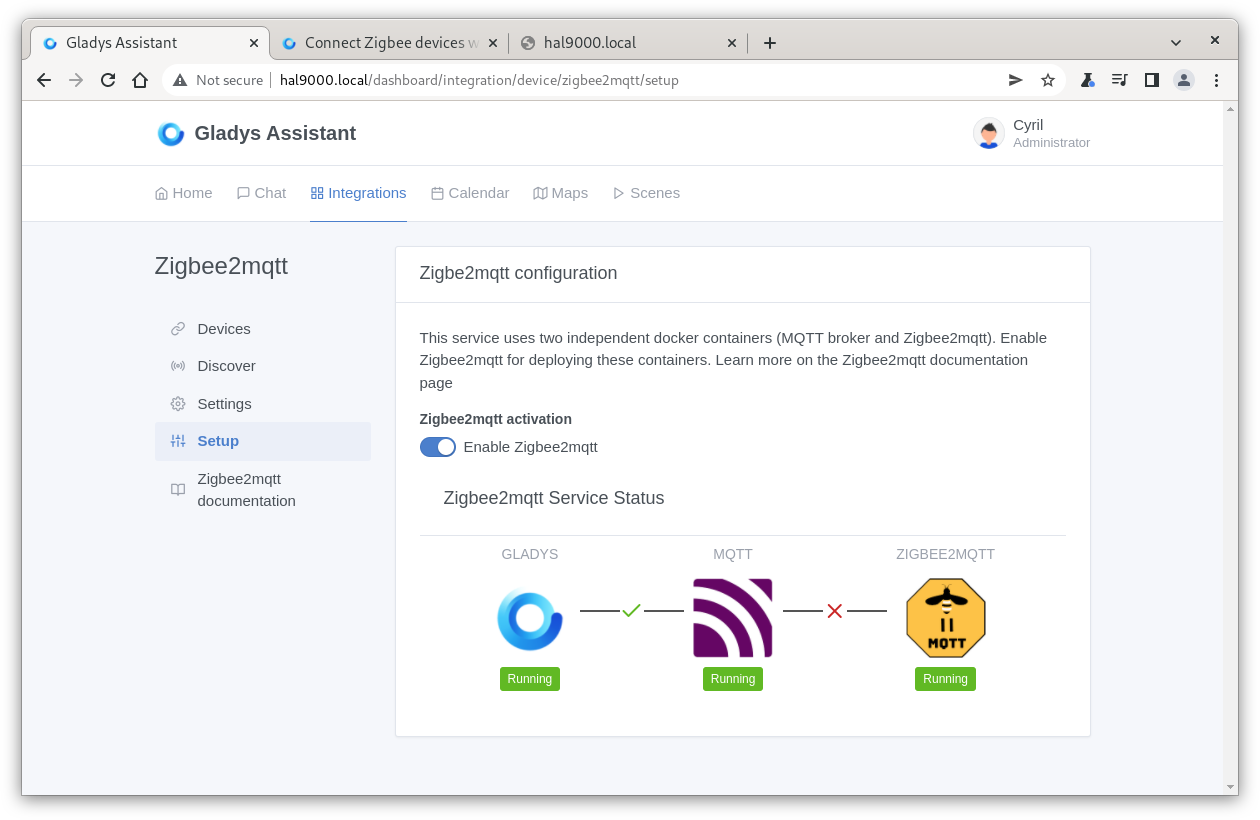
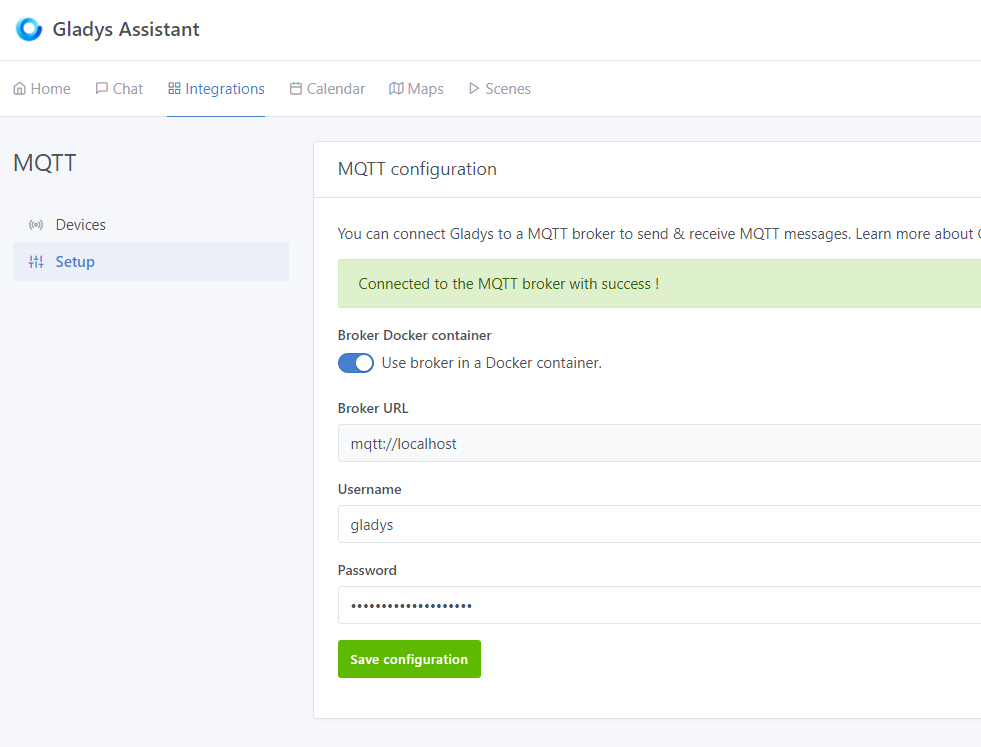
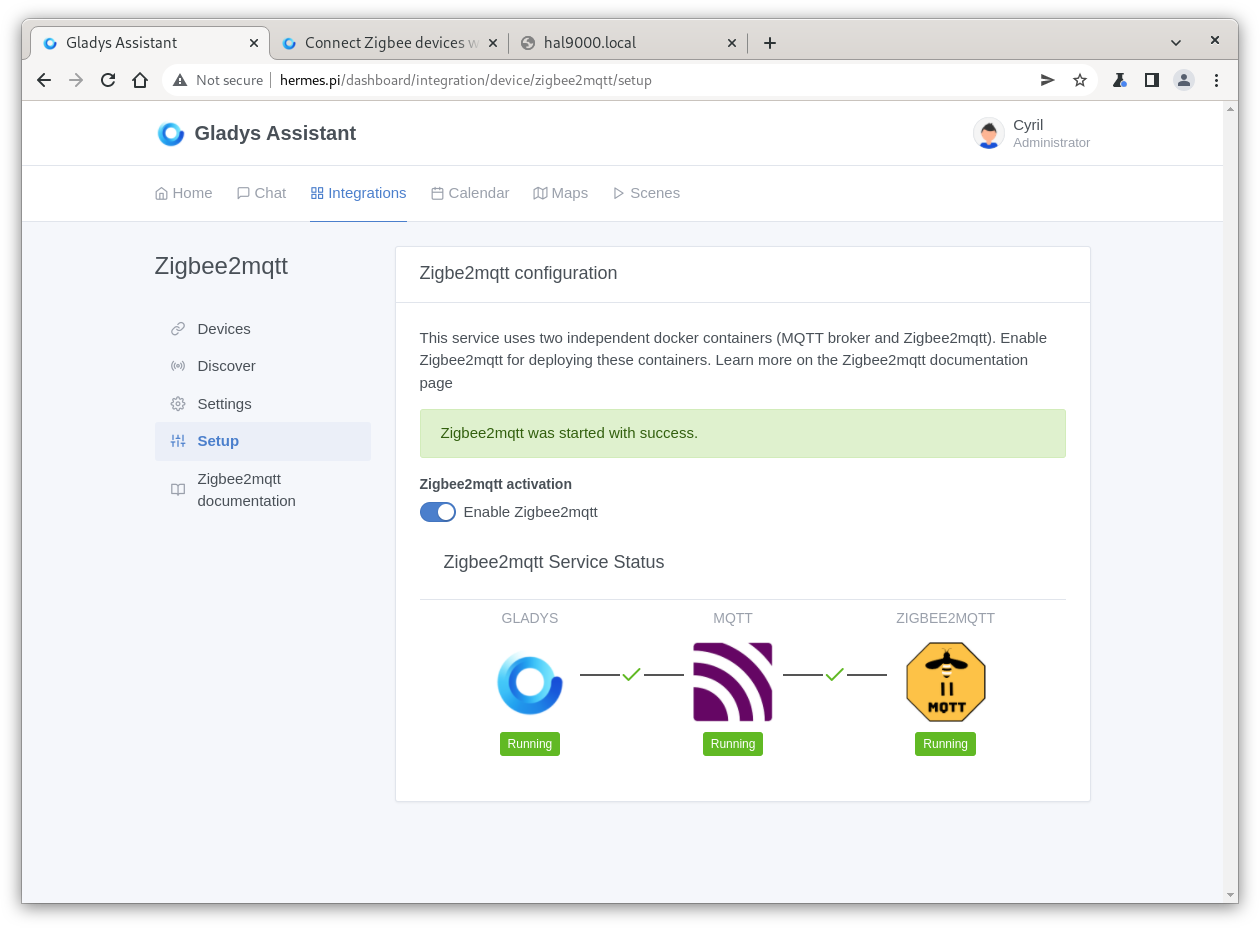
I know that many of you have asked for Debian 11 / Ubuntu 21 compatibility, I need you to check that everything works, especially at the level of Zigbee2mqtt and MQTT integration.
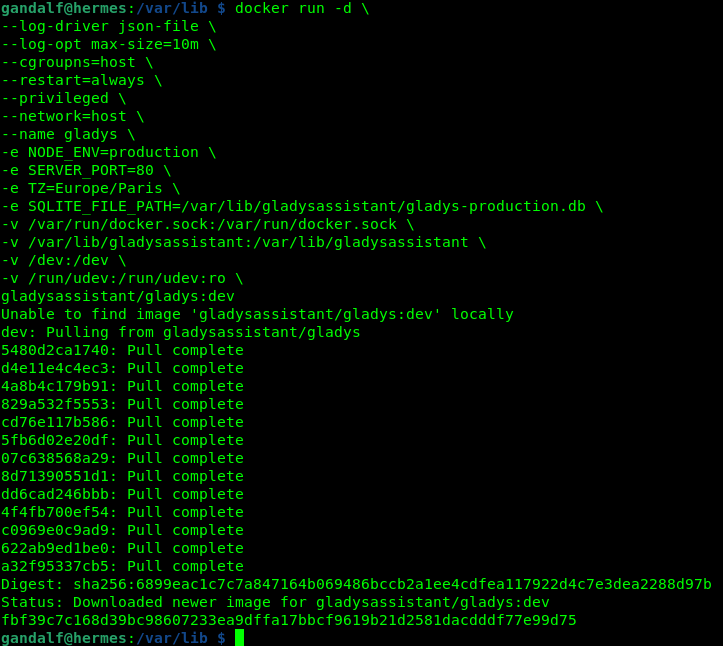
If you know what you are doing, you can launch the Docker image « Gladys DEV » with the following command:
(Do NOT launch this on a real Gladys production instance…)
docker run -d \
--log-driver json-file \
--log-opt max-size=10m \
--cgroupns=host \
--restart=always \
--privileged \
--network=host \
--name gladys \
-e NODE_ENV=production \
-e SERVER_PORT=80 \
-e TZ=Europe/Paris \
-e SQLITE_FILE_PATH=/var/lib/gladysassistant/gladys-production.db \
-v /var/run/docker.sock:/var/run/docker.sock \
-v /var/lib/gladysassistant:/var/lib/gladysassistant \
-v /dev:/dev \
-v /run/udev:/run/udev:ro \
gladysassistant/gladys:dev
As you can see, this is a Docker dev image (gladysassistant/gladys:dev), this tag corresponds to our pre-release deployment tests, you should not use this tag for a real installation ![]()
Something interesting to test with this version is to change the path of the Docker volumes, for example by changing this line: -v /var/lib/gladysassistant:/var/lib/gladysassistant \ by putting another folder on the host (left side), and then launching an MQTT and Zigbee2mqtt container, and checking that the containers have been launched with the same volume on the host.