Salut à tous !
La prochaine version de Gladys est quasi finalisée, et apporte son lot de nouvelles compatibilités et de corrections de bugs 
Cette fois-ci, pas de nouvelles fonctionnalités mais des travaux long terme sur la compatibilité avec les nouvelle versions majeures des OS Linux : Debian 11 et Ubuntu > 20.04, ainsi que des changements pour permettre une installation facilité sur NAS Unraid et Synology.
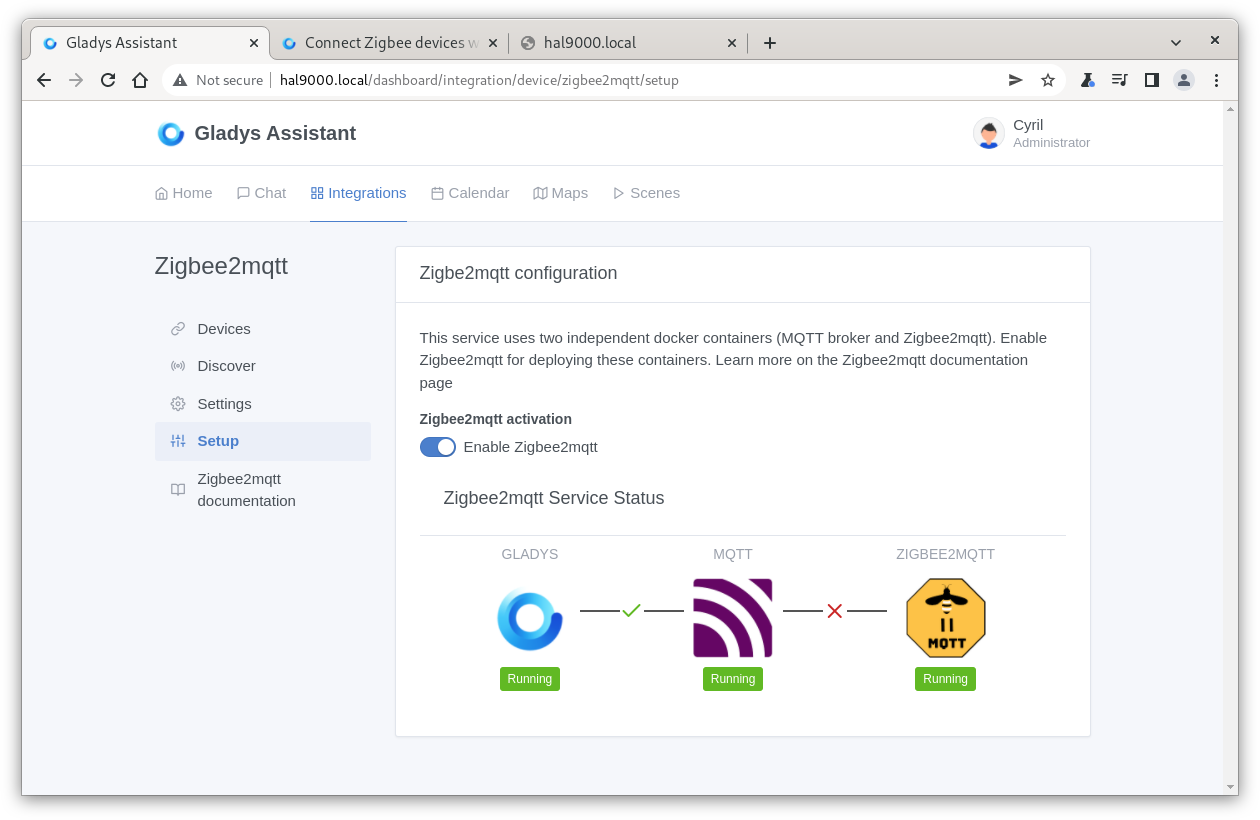
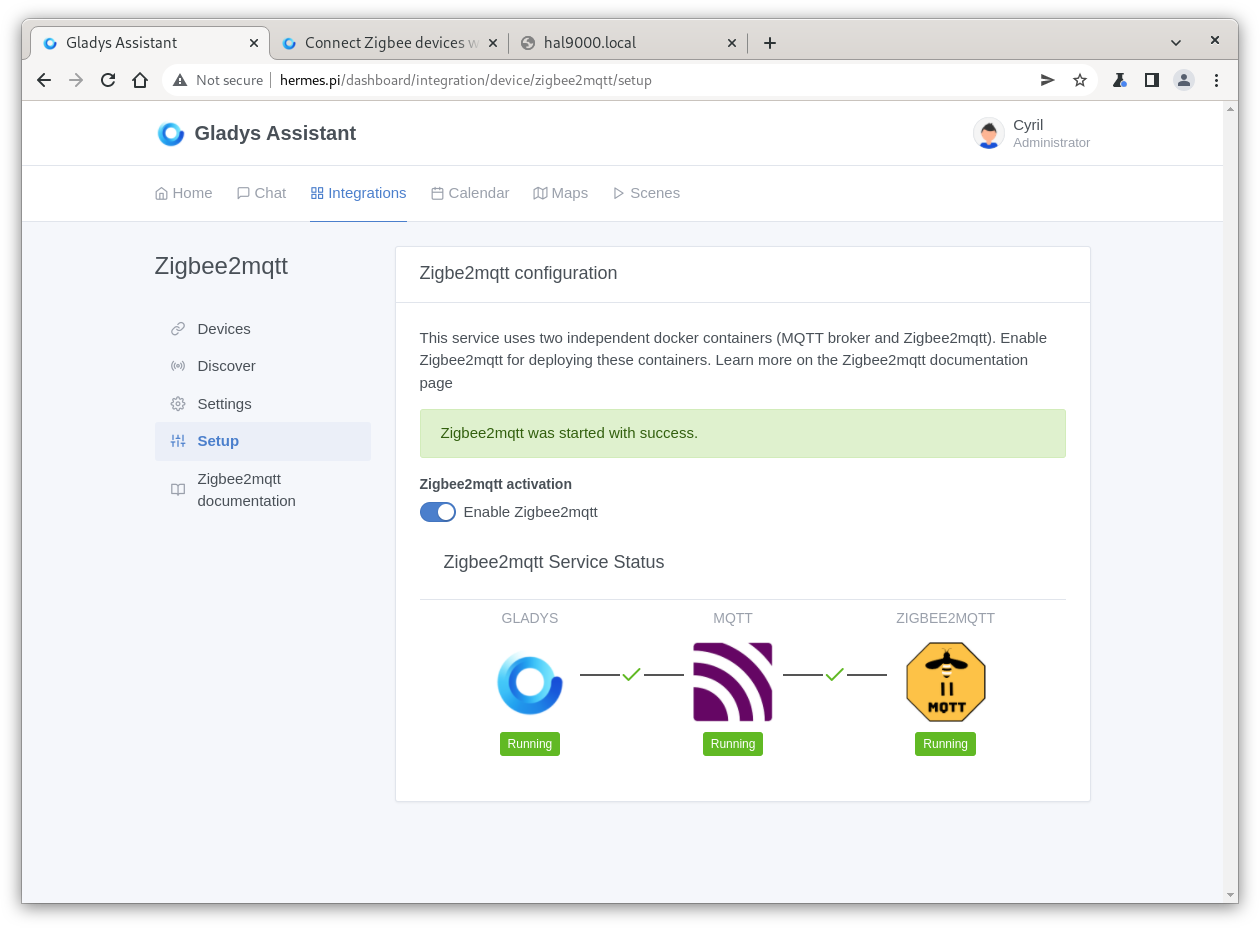
Il y avait notamment des problèmes pour lancer les container MQTT et Zigbee2mqtt sur ces plateformes.
Les bugfixes
-
Correction d’un bug assez important où la fréquence de rafraichissement des appareils comme les caméras n’étaient pas forcément pris en compte après un changement, voir pire, la fréquence de rafraichissement était prise en compte plusieurs fois, ce qui fait qu’une caméra dont la fréquence a été changée pouvait rafraichir plusieurs fois par cycle
-
Correction d’un bug dans les scènes où le bouton “essayer” de l’action “requête HTTP” ne prenait pas en compte les headers renseignés
-
Correction d’un bug où le nom d’un tableau de bord n’était pas mis à jour dans la liste quand le nom du tableau de bord en cours était renommé
-
Ajout des traductions sur les capteurs de vibrations
J’ai besoin de vous
J’ai besoin de vous pour tester en amont cette version. Je m’adresse à un public CONFIRMÉ !! Si tu lis ce post, et que tu n’es pas sûr de toi, attend la semaine prochaine pour la sortie de l’image de prod 
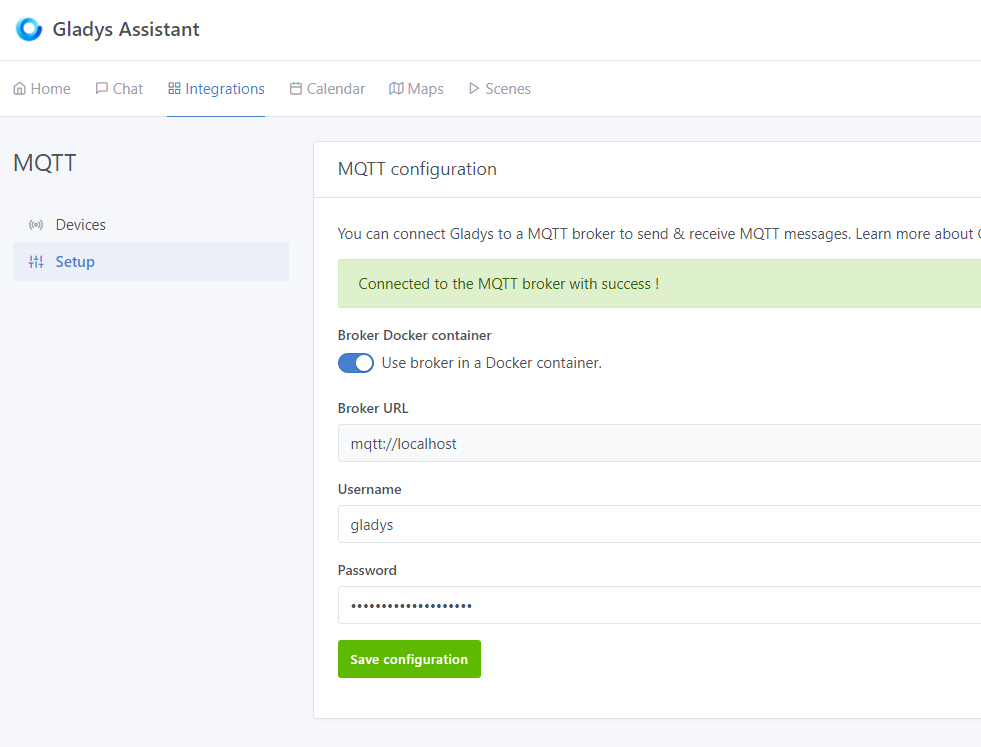
Je sais que vous êtes nombreux à avoir demandé la compatibilité Debian 11 / Ubuntu 21, j’ai besoin de vous pour vérifier que tout fonctionne, notamment au niveau de l’intégration Zigbee2mqtt et MQTT.
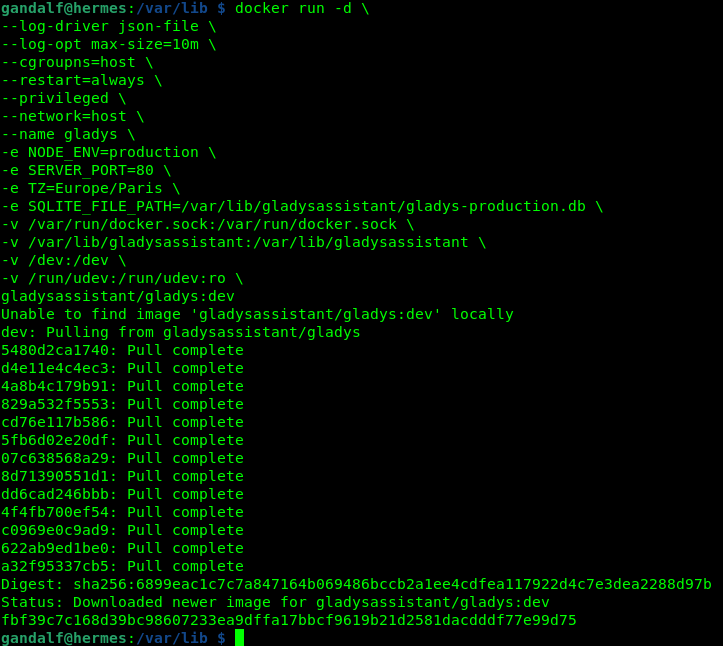
Si tu sais ce que tu fais, tu peux lancer l’image Docker “Gladys DEV” avec la commande suivante :
(A ne PAS lancer sur une vraie instance Gladys de production…)
docker run -d \
--log-driver json-file \
--log-opt max-size=10m \
--cgroupns=host \
--restart=always \
--privileged \
--network=host \
--name gladys \
-e NODE_ENV=production \
-e SERVER_PORT=80 \
-e TZ=Europe/Paris \
-e SQLITE_FILE_PATH=/var/lib/gladysassistant/gladys-production.db \
-v /var/run/docker.sock:/var/run/docker.sock \
-v /var/lib/gladysassistant:/var/lib/gladysassistant \
-v /dev:/dev \
-v /run/udev:/run/udev:ro \
gladysassistant/gladys:dev
Comme vous pouvez le voir, il s’agit ici d’une image Docker de dev ( gladysassistant/gladys:dev ), ce tag correspond à nos tests de déploiement de pre-release, il ne faut pas utiliser ce tag pour une vrai installation
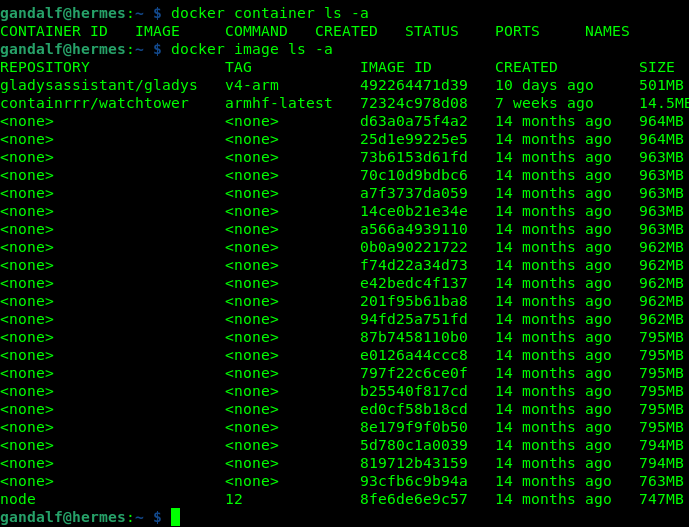
Quelque chose qui est intéressant de tester avec cette version, c’est de changer le chemin des volumes Docker, par exemple en changeant cette ligne : -v /var/lib/gladysassistant:/var/lib/gladysassistant \ en mettant un autre dossier côté host (à gauche), et en lançant ensuite un container MQTT et Zigbee2mqtt, et de vérifier que les containers ont bien été lancé avec le même volume sur l’host.