I’ll start with the most important: I am a real beginner and a pure self-taught computer enthusiast, but with perseverance I am making progress.
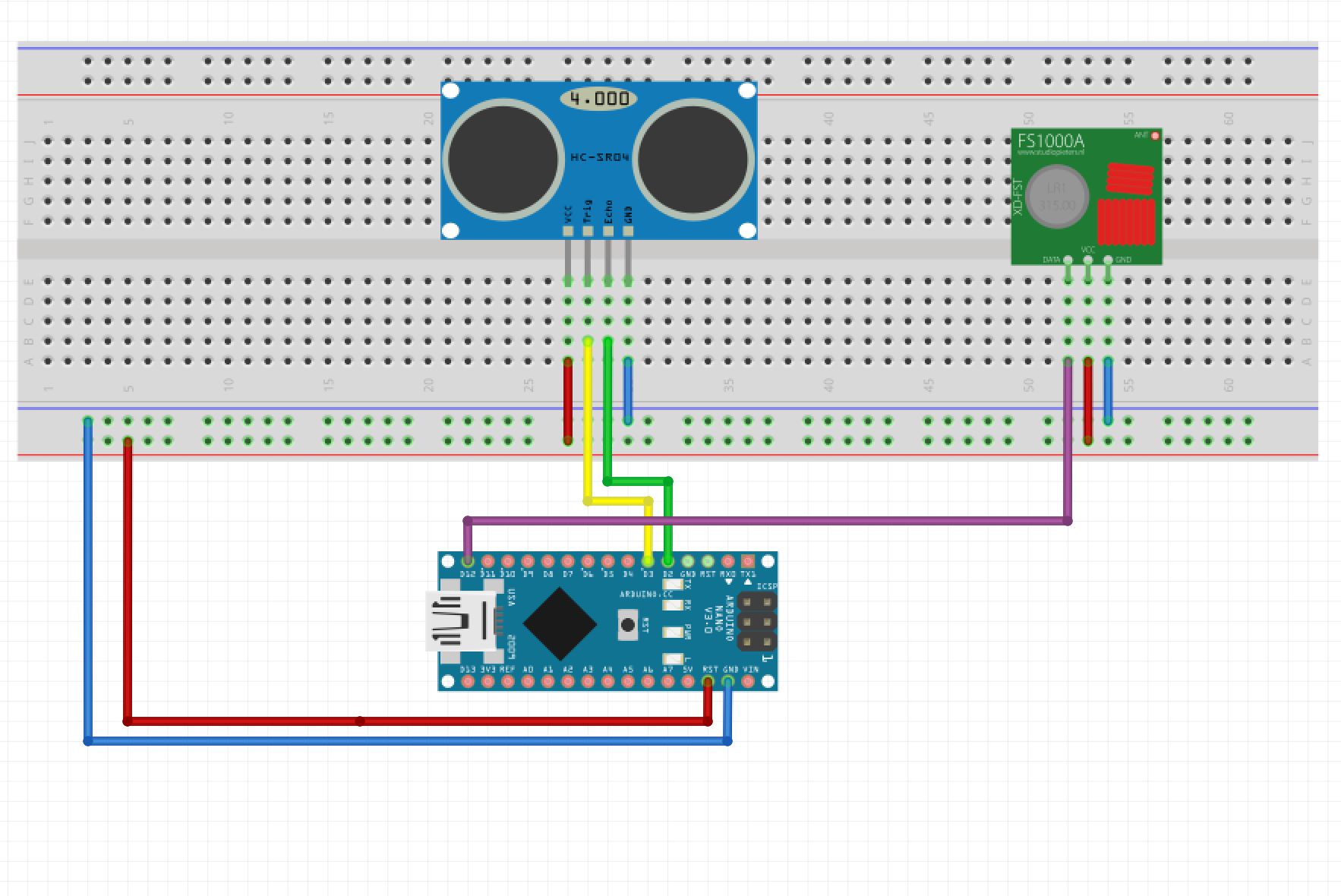
I managed to create a code using an Arduino Nano + HRC-04 ultrasonic sensor and a 433Mhz transmitter to retrieve the distance from the top of my tank to the bottom.
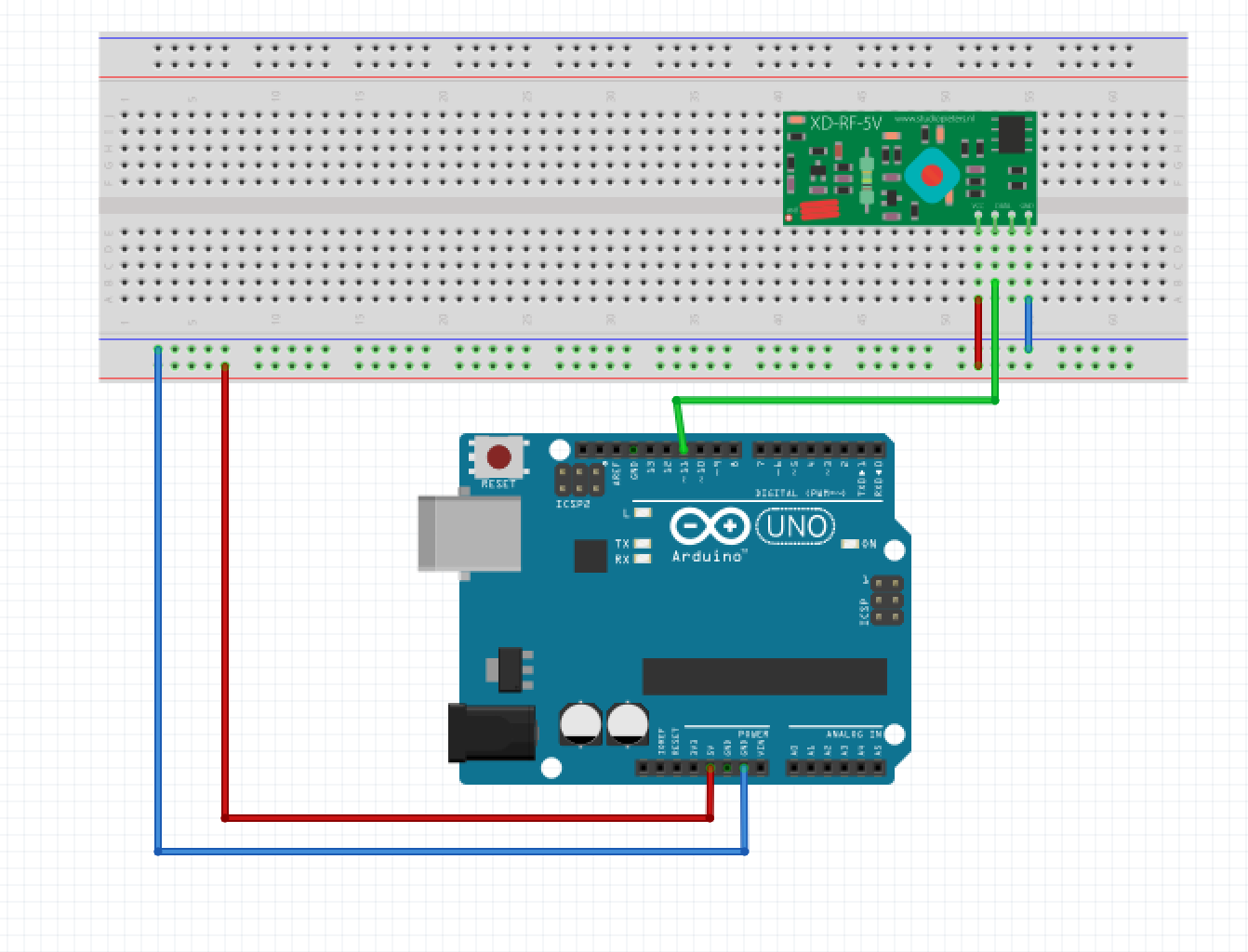
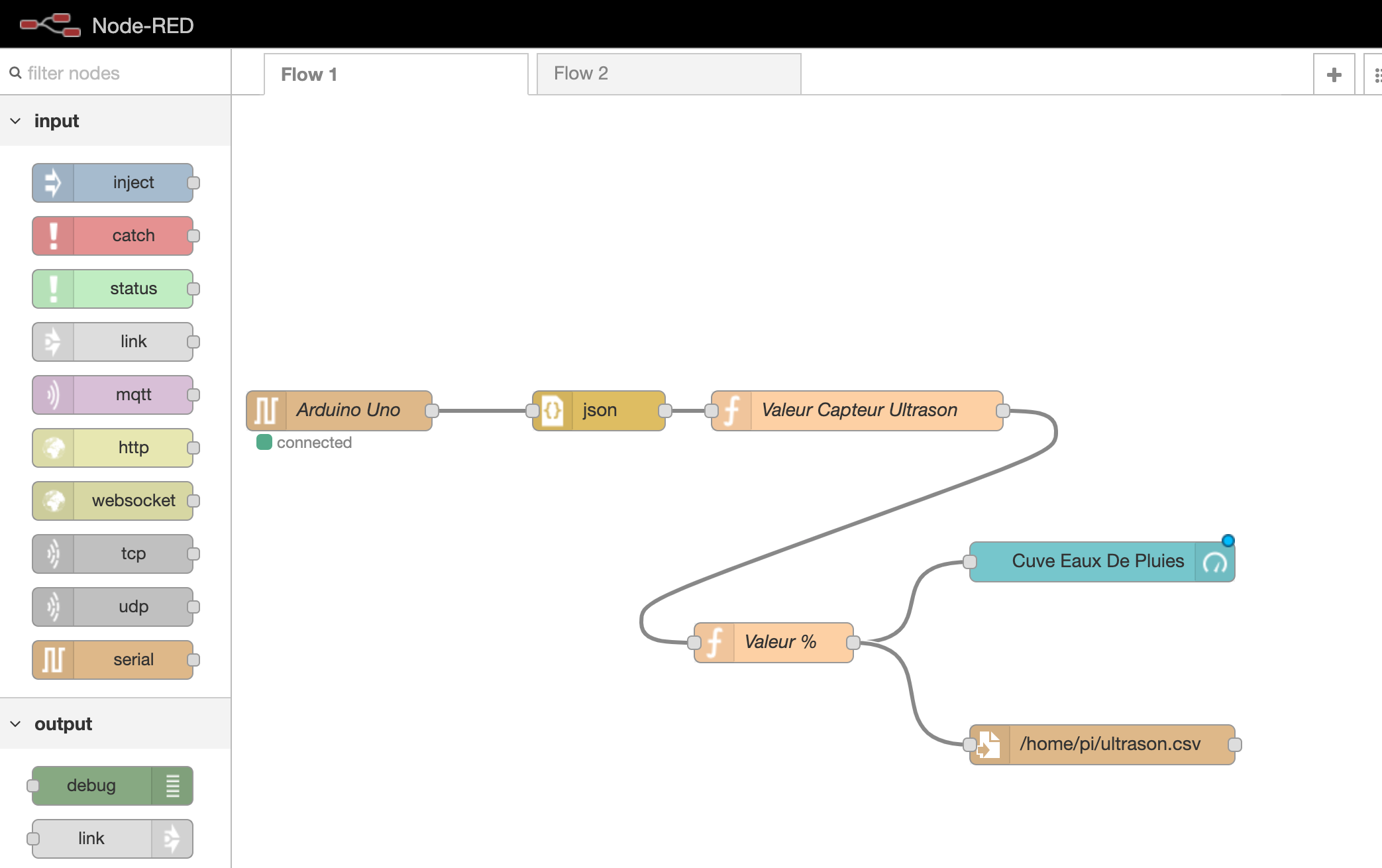
Then, via the receiver code on the Arduino Uno, I modified the value in JSON format and finally I used node-red to create a gauge (like the rpi-info module by @piznel).
Could someone help me create a module on Gladys to integrate it into the dashboard?
I assume you’re on Gladys 3? I don’t know if you’re following the project’s progress, but we’re currently working on Gladys 4 and the first alpha version has already been released.
In Gladys 3, it’s not possible to create a dashboard box linked to a module. In Gladys 4, the module functionality is a bit different, but it’s possible!
you will make two people happy, I’m also interested in your setup/photos . I also have a project to monitor the remaining water in my rainwater tank, so as not to start the automatic watering when it’s empty ^^
/*
* Example code for an HC-SR04 ultrasonic sensor.
* Value communication at 433MHz
*/
#include <VirtualWire.h>
/* Constants for the pins */
const byte TRIGGER_PIN = 2; // TRIGGER pin
const byte ECHO_PIN = 3; // ECHO pin
const byte VW_SET_TX_PIN = 12;
/* Constants for the timeout */
const unsigned long MEASURE_TIMEOUT = 25000UL; // 25ms = ~8m at 340m/s
/* Speed of sound in air in mm/us */
const float SOUND_SPEED = 340.0 / 1000;
/** Setup() function */
void setup() {
/** Initialize the VirtualWire library */
vw_setup(2000);
/* Initialize the serial port */
Serial.begin(115200);
/* Initialize the pins */
pinMode(TRIGGER_PIN, OUTPUT);
digitalWrite(TRIGGER_PIN, LOW); // The TRIGGER pin must be LOW at rest
pinMode(ECHO_PIN, INPUT);
}
/** Loop() function */
void loop() {
/* 1. Start a distance measurement by sending a HIGH pulse of 10µs on the TRIGGER pin */
digitalWrite(TRIGGER_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER_PIN, LOW);
/* 2. Measure the time between the sending of the ultrasonic pulse and its echo (if it exists) */
long measure = pulseIn(ECHO_PIN, HIGH, MEASURE_TIMEOUT);
/* 3. Calculate the distance from the measured time */
int distance_mm = measure / 2.0 * SOUND_SPEED;
/* Display the results in mm */
Serial.print(distance_mm);
Serial.println();
/* Send the message */
vw_send((byte *) & distance_mm, sizeof(distance_mm));
/* Wait for the end of the transmission */
vw_wait_tx();
/* Wait delay to avoid displaying too many results per second */
delay(1000);
}
//load libraries
#include <VirtualWire.h>
const byte VW_SET_RX_PIN = 11;
void setup() {
Serial.begin(115200);
// Initialize the VirtualWire library
// You can change the RX/TX/PTT pins before vw_setup() if necessary
vw_setup(2000);
vw_rx_start(); // Now we can receive messages
}
void loop() {
float distance_mm;
byte message_size = sizeof(float);
/*
The "message_size" variable must be reset to
the size of the variable before being able to receive a message.
The easiest way is to use a local variable to avoid
having to reassign the value at the beginning of loop().
*/
// Wait to receive a message
vw_wait_rx();
if (vw_get_message((byte *) &distance_mm, &message_size)) {
// Copy the message, whether it is corrupted or not
if (distance_mm >= 0 && distance_mm <= 400)
{ Serial.print("Tank filled to: 100%"); }
else if (distance_mm >= 401 && distance_mm <= 540)
{ Serial.print("Tank filled to: 90%"); }
else if (distance_mm >= 541 && distance_mm <= 680)
{ Serial.print ("Tank filled to: 80%"); }
else if (distance_mm >= 681 && distance_mm <= 820)
{ Serial.print ("Tank filled to: 70%"); }
else if(distance_mm >= 821 && distance_mm <= 960)
{ Serial.print ("Tank filled to: 60%"); }
else if (distance_mm >= 961 && distance_mm <= 1100)
{ Serial.print ("Tank filled to: 50%"); }
else if (distance_mm >= 1101 && distance_mm <= 1290)
{ Serial.print ("Tank filled to: 40%"); }
else if (distance_mm >= 1291 && distance_mm <= 1400)
{ Serial.print ("Tank filled to: 30%"); }
else if (distance_mm >= 1401 && distance_mm <= 1550)
{ Serial.print ("Tank filled to: 20%"); }
else if (distance_mm >= 1551 && distance_mm <= 1700)
{ Serial.print ("Tank almost empty: 10%"); }
else if (distance_mm >= 1701 && distance_mm <= 2000)
{ Serial.print ("Tank almost empty: 5%"); }
Serial.println();
}
}
//load libraries
#include <VirtualWire.h>
const byte VW_SET_RX_PIN = 11;
void setup() {
Serial.begin(115200);
// Initialize the VirtualWire library
// You can change the RX/TX/PTT pins before vw_setup() if necessary
vw_setup(2000);
vw_rx_start(); // Now we can receive messages
}
void loop() {
int distance_mm;
byte message_size = sizeof(int);
/*
The "message_size" variable must be reset to
the size of the variable before being able to receive a message.
The easiest way is to use a local variable to avoid
having to reassign the value at the beginning of loop().
*/
// Wait to receive a message
vw_wait_rx();
if (vw_get_message((byte *) &distance_mm, &message_size))
// Copy the message, whether it is corrupted or not
Serial.print("{\"HRC_04\":");
Serial.print(distance_mm);
Serial.println("}");
delay(5000);
}
Last summer I installed a Fibaro double switch behind a double switch.
Switch 1: turns on the pump that sends water to the garden
Switch 2: turns on the solenoid valve that allows water to pass for automatic watering
Now I need to add a system that prevents the pump from turning on if there is no more water. This is where I am, I think I’ll get back to it in the spring so I can test it, it’s too cold now
Rather than an Arduino, an ESP seems perfectly sufficient to me, but I haven’t progressed any further than that.