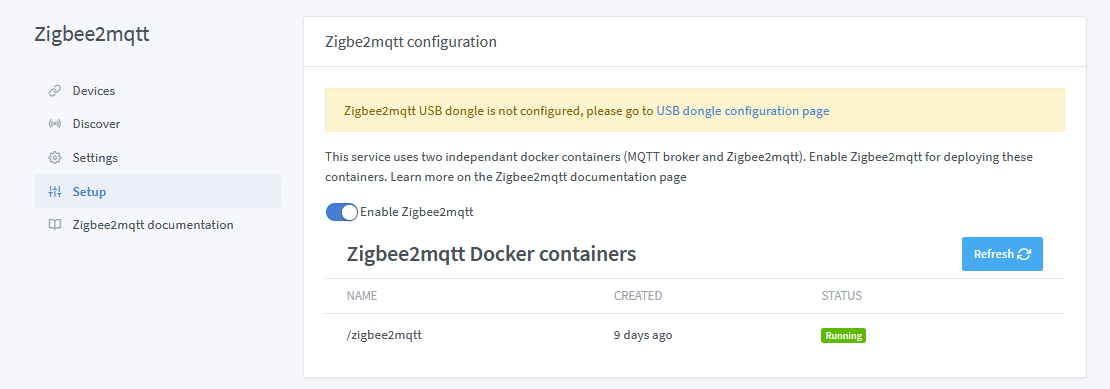
Dans la documentation la commande de création du conteneur la commande prend déjà en compte le mappage de volume A privacy-first, open-source home assistant | Gladys Assistant
docker run -d \
--restart=always \
--privileged \
--network=host \
--name gladys \
-e NODE_ENV=production \
-e SERVER_PORT=80 \
-e TZ=Europe/Paris \
-e SQLITE_FILE_PATH=/var/lib/gladysassistant/gladys-production.db \
-v /var/run/docker.sock:/var/run/docker.sock \
-v /var/lib/gladysassistant:/var/lib/gladysassistant \
-v /dev:/dev \
gladysassistant/gladys:4.0.0-beta-arm
-v /dev:/dev ou -v /run/udev:/run/udev et surtout –privileged
Dans ton script il manque --privileged
Sous entendu que la portée du WiFi ou que l’ethernet soit dispo. Je vois l’idée , je penses que les pods vont répondre à ce besoin.
La criticité est la même entre router et coordinator, on peut exprimer la même chose avec le dongle , s’il tombe tu n’as plus rien. Faut juste pas qu’on conseil autre chose que ce que défini le projet zigbee2mqtt pour augmenter la portée. ( Un router n’est ni plus ni moins qu’un coordinateur avec un firmware différent ).
Je compte tester ce soir ton image , je te ferai un retour ![]()


 )
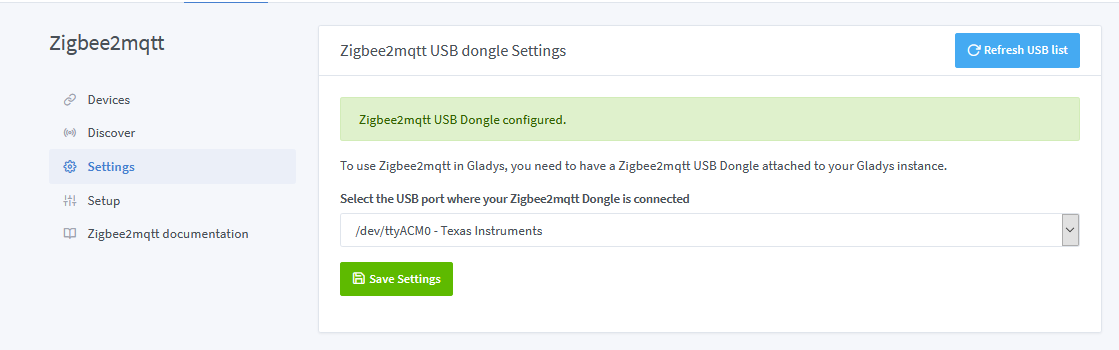
) ( pour le nom du stick )
( pour le nom du stick )